

VL53L8CX搭載 ToF 8×8ゾーン 距離センサ(400 cm)【スイッチサイエンス取寄品】
POLOLU-3419
| web販売価格 : | ¥5,401(税込) 注文受付単位:1 |
|---|---|
| 在庫 : | 通常5営業日以内出荷 |
| 送料区分 : | 宅配便(ヤマト運輸) |
| メーカー : | その他メーカ/ブランド |
| 商品コード : | O58S3L |
| 品名/型番 : | VL53L8CX搭載 ToF 8×8ゾーン 距離センサ(400 cm)【スイッチサイエンス取寄品】 / POLOLU-3419 |
| 登録日 : | 2024.5.8 |
概要
ST社のレーザー測距センサ VL53L8CX を使った距離センサです。I2CまたはSPI経由で最大 4 mまで高速かつ正確に測定できます。
マルチゾーンで複数ターゲットへの距離を同時測定し、解像度 8 x 8 までのデプスマップデータを提供します。以前のバージョンと比べて、周辺光での性能が改善されています。
電圧レギュレータとレベルシフタを搭載、入力電圧 3.2 〜 5.5 Vで動作します。ピンは2.54 mmピッチで、ブレッドボードやユニバーサル基板を簡単に使用できます。
注意:
VL53L8CX の初期化と読み取りデータ処理には、大量のRAM/コードスペースが必要(90 KB以上のプログラムメモリ)となるので、8 bitマイコンでの使用は非推奨です。VL53L1X、 VL53L0X、VL6180X 搭載モジュール(マルチゾーン/マルチターゲットには非対応)をご検討ください。
マルチゾーンで複数ターゲットへの距離を同時測定し、解像度 8 x 8 までのデプスマップデータを提供します。以前のバージョンと比べて、周辺光での性能が改善されています。
電圧レギュレータとレベルシフタを搭載、入力電圧 3.2 〜 5.5 Vで動作します。ピンは2.54 mmピッチで、ブレッドボードやユニバーサル基板を簡単に使用できます。
注意:
VL53L8CX の初期化と読み取りデータ処理には、大量のRAM/コードスペースが必要(90 KB以上のプログラムメモリ)となるので、8 bitマイコンでの使用は非推奨です。VL53L1X、 VL53L0X、VL6180X 搭載モジュール(マルチゾーン/マルチターゲットには非対応)をご検討ください。
詳細
概要
VL53L8CXは 940 nm クラス1レーザーを内蔵した小型の3D LiDARシステムです。物体距離を推定するのに反射光の強さを利用する従来のIRセンサとは異なり、ST社のFlightSenseテクノロジーを使用、赤外線レーザ光パルスが物体に到達し、反射して戻ってくるまでの時間を正確に測定します。この手法は周辺光の条件や色、形状、テクスチャー、反射率などのターゲット特性には依存せず(センサの最大距離範囲には影響)、絶対距離を測定します。
VL53L8CX は、ベーシックモデルのToFセンサとは異なり、視野を4 x 4 または 8 x 8のグリッドのゾーンに分割して、ゾーン毎にマルチターゲットを含む個別の測定値を読み取るマルチゾーン測距出力を行います。つまり、単一の距離計測を行うのではなく、低解像度デプスマップを作成することができます。
以下はVL53L8CXと同種期のを持つVL53L5CXで作成したマップの画像例です。
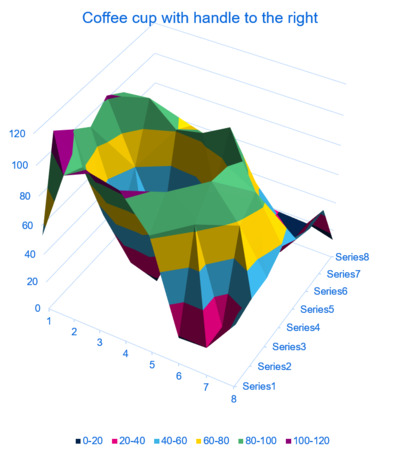
VL53L5CX ToFセンサで検出されたコーヒーカップ 特徴
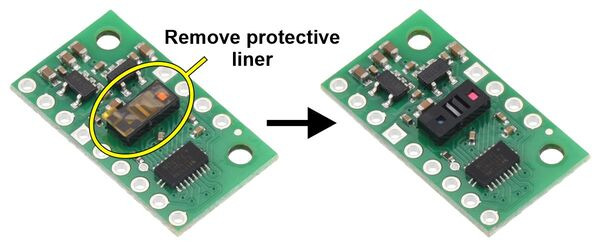
注意:センサ保護ライナーがついている場合は、はがしてご使用ください。
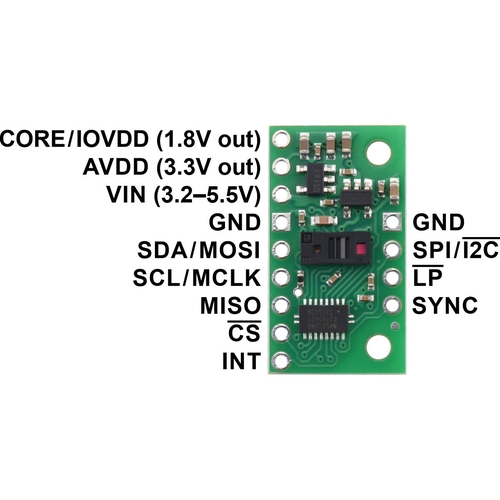
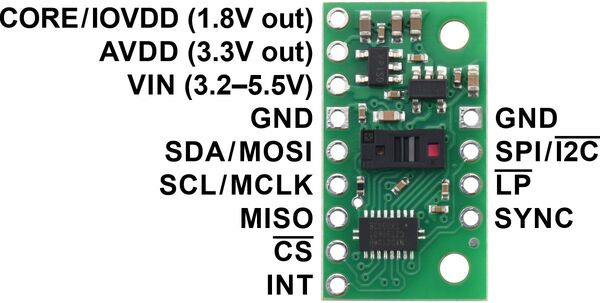
ピン配置
注意:VL53L8CXモジュールのレベルシフタは、 外部負荷に敏感です。 できるだけ短く(理想的には8 cm以下)配線する、他のデバイスをI2C/SPIバスに追加しないなどを行ってください。また、レベルシフタによる発振がある場合、インターフェースラインに数10 pF程度のコンデンサを追加してください。
回路図
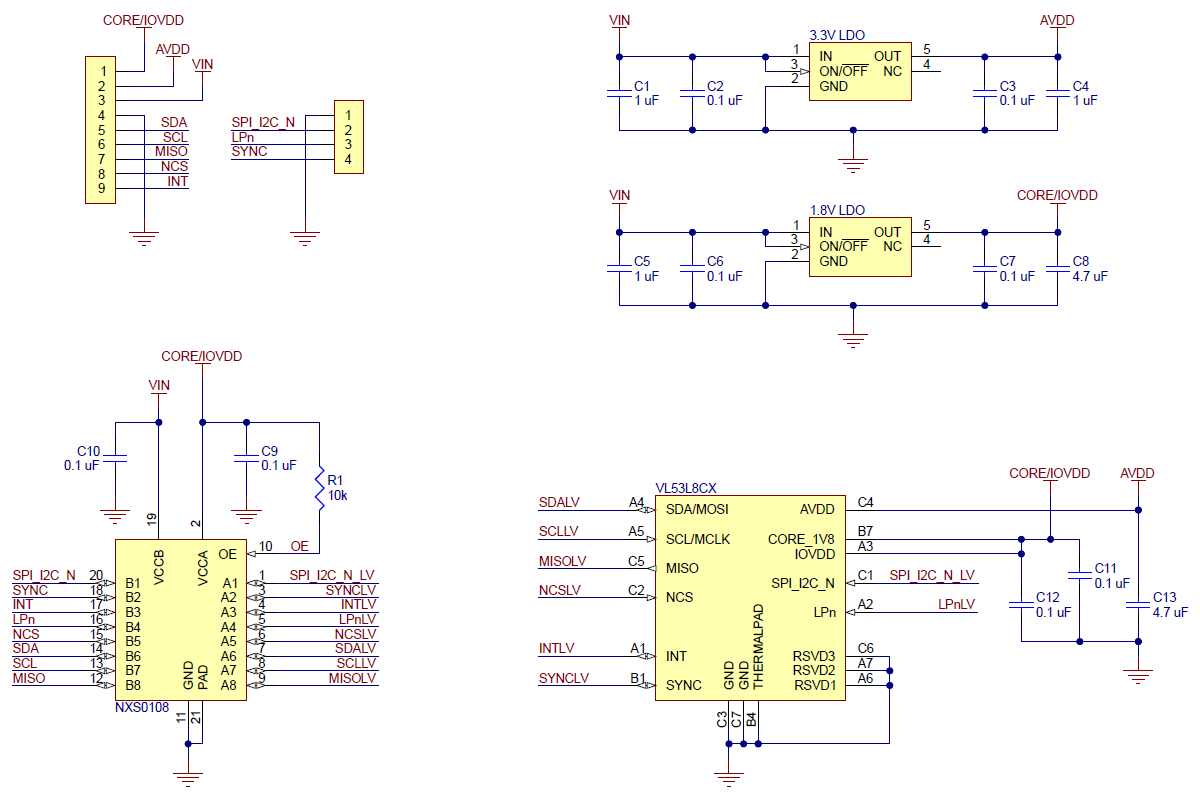
Pololu ST ToFセンサ
資料
製造元希望小売価格 : 24.95ドル(税別)
製造元の販売ページ : https://www.pololu.com/product/...
商品コード: POLOLU-3419
【ご注意】
・使用方法についてのお問い合わせにはお答えできません。
・当社から提供する情報はウェブサイトに記載しているものがすべてとなります。
・故障、不良があった場合にその原因追求は致しません。
・一部の商品を除き、輸入商品の再輸出については、該非判定書、パラメーターシートなどのご用意はいたしません。
VL53L8CXは 940 nm クラス1レーザーを内蔵した小型の3D LiDARシステムです。物体距離を推定するのに反射光の強さを利用する従来のIRセンサとは異なり、ST社のFlightSenseテクノロジーを使用、赤外線レーザ光パルスが物体に到達し、反射して戻ってくるまでの時間を正確に測定します。この手法は周辺光の条件や色、形状、テクスチャー、反射率などのターゲット特性には依存せず(センサの最大距離範囲には影響)、絶対距離を測定します。
VL53L8CX は、ベーシックモデルのToFセンサとは異なり、視野を4 x 4 または 8 x 8のグリッドのゾーンに分割して、ゾーン毎にマルチターゲットを含む個別の測定値を読み取るマルチゾーン測距出力を行います。つまり、単一の距離計測を行うのではなく、低解像度デプスマップを作成することができます。
以下はVL53L8CXと同種期のを持つVL53L5CXで作成したマップの画像例です。
- 測距範囲: 2〜400 cm
- エミッタ:940 nm 不可視光 Class 1 VCSEL(Vertical-Cavity Surface-Emitting Laser)
- 検出器:SPADS(Single Photon Avalanche Diode)受光アレイ
- 視野角(FoV):65° 対角 (45° 水平/垂直)
- 出力フォーマット(I2C/SPI):ヒストグラム
- 動作電圧:3.2〜5.5 V
- 電源電流:約 100 mA(デフォルト設定、アクティブ測距中の平均電流値)
- ピーク電流: 150 mA
- 寸法:13 × 23 × 3 mm
- 重量:0.7 g (ヘッダピン除く)
注意:センサ保護ライナーがついている場合は、はがしてご使用ください。
ピン配置
| PIN | Description |
|---|---|
| CORE/IOVDD | 安定化1.8 V出力。最大約50 mA給電可。 |
| AVDD | 安定化3.3 V出力。最大約220 mA給電可。 (VIN < 3.4 Vでは、AVDD < 3.3 Vになるが、AVDD 3.13 Vまで動作可) |
| VIN | 3.2 〜 5.5 V の電源に接続。レベルシフタ―は全IOラインをこのレベルにセット。(デフォルトはプルアップ) |
| GND | 0 Vに接続。 I2C または SPI の制御ソースはこのボードの共通グランドをシェアする必要あり |
| SDA/MOSI | レベルシフト後の I2C/SPI データ。 |
| SCL/MCLK | レベルシフト後の I2C/SPI クロック。 |
| MISO | レベルシフト後の SPIデータ出力。 |
| CS | レベルシフト後の SPI イネーブル。(NCS) アクティブロー。デフォルトはプルアップ。 立ち下りエッジでSPI通信開始。 |
| INT | レベルシフト後のプログラマブル割り込み出力。 |
| SPI/ I2C | レベルシフト後の SPI/I2Cモードセレクト。(SPI_I2C_N) デフォルトはプルアップでSPIモードを選択。 ローで I2C モード。トグルで I2Cインターフェースをリセット。 |
| LP | レベルシフト後のI2C ディスエイブル入力。(LPn) アクティブロー。デフォルトはプルアップ。 プルダウンで I²C 通信ディスエイブル。 I²C アドレス変更時に使用。 |
| SYNC | レベルシフト後の 外部同期ピン。 立ち上がりエッジでシングルショット測距可能。 |
注意:VL53L8CXモジュールのレベルシフタは、 外部負荷に敏感です。 できるだけ短く(理想的には8 cm以下)配線する、他のデバイスをI2C/SPIバスに追加しないなどを行ってください。また、レベルシフタによる発振がある場合、インターフェースラインに数10 pF程度のコンデンサを追加してください。
回路図
Pololu ST ToFセンサ
 VL6180X VL6180X |  VL53L0X VL53L0X |  VL53L1X VL53L1X |  VL53L3CX VL53L3CX |  VL53L5CX VL53L5CX |  VL53L7CX VL53L7CX |  VL53L8CX VL53L8CX | |
| 測距範囲: | 約1 cm〜60 cm | 約3 cm〜200 cm | 4 cm〜400 cm | 1 cm〜500 cm | 2 cm〜400 cm | 2 cm〜350 cm | 2 cm〜400 cm |
| 視野角: | 25° | 25° | 15° 〜 27° | 25° | 65°/最大8×8 ゾーン | 90°/最大8×8 ゾーン | 65° /最大8×8 ゾーン |
資料
- 基板回路図(PDF)
- 基板寸法図(PDF)
- 基板3Dモデル(STEPダウンロード)
- 基板ドリルモデル(DXFダウンロード)
- UM3109マニュアル : A guide to using the VL53L8CX multizone Time-of-Flight ranging sensor with wide field of view Ultra Lite Driver(PDF)
- UM10204 I²C-busマニュアル(PDF)
- VL53L8CXドキュメンテーション
- Ultra lite driver (ULD) API for the VL53L8CX low-power, high-performance, 8x8 multizone Time of-Flight sensor
製造元希望小売価格 : 24.95ドル(税別)
製造元の販売ページ : https://www.pololu.com/product/...
商品コード: POLOLU-3419
【ご注意】
・使用方法についてのお問い合わせにはお答えできません。
・当社から提供する情報はウェブサイトに記載しているものがすべてとなります。
・故障、不良があった場合にその原因追求は致しません。
・一部の商品を除き、輸入商品の再輸出については、該非判定書、パラメーターシートなどのご用意はいたしません。





















![大阪・日本橋店舗半生中継/[シリコンハウス]店内映像](/img/usr/top/Silitempo.jpg)







{kind=link}